
The hardware and bandwidth for this mirror is donated by METANET, the Webhosting and Full Service-Cloud Provider.
If you wish to report a bug, or if you are interested in having us mirror your free-software or open-source project, please feel free to contact us at mirror[@]metanet.ch.
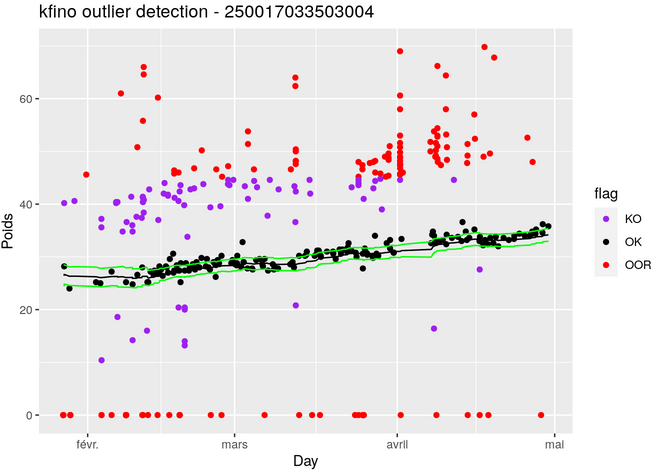
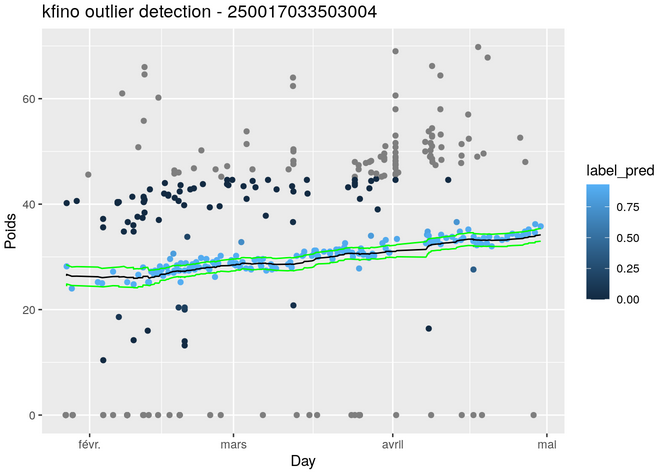
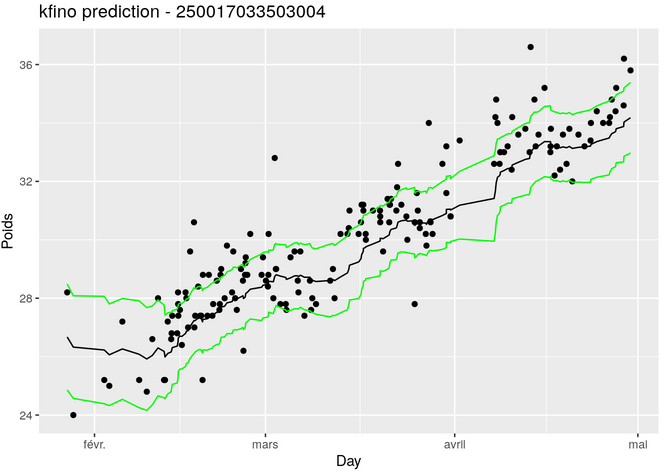
The kfino algorithm was developped for time courses in order to detect impulse noised outliers and predict the parameter of interest mainly for data recorded on the walk-over-weighing system described in this publication:
E.González-García et. al. (2018) A mobile and automated walk-over-weighing system for a close and remote monitoring of liveweight in sheep. vol 153: 226-238. https://doi.org/10.1016/j.compag.2018.08.022
Kalman filter with impulse noised outliers (kfino) is a robust sequential algorithm allowing to filter data with a large number of outliers. This algorithm is based on simple latent linear Gaussian processes as in the Kalman Filter method and is devoted to detect impulse-noised outliers. These are data points that differ significantly from other observations.
The method is described in full details in the following arxiv preprint: https://arxiv.org/abs/2208.00961.
To install the kfino package, the easiest is to install it directly from GitLab. Open an R session and run the following commands:
if (!require("remotes")) {
install.packages("remotes")
}
remotes::install_gitlab("isabelle.sanchez/kfino",host = "forgemia.inra.fr",
build_vignettes=TRUE)Once the package is installed on your computer, it can be loaded into a R session:
library(kfino)
help(package="kfino")Please, have a look to the vignettes that explain how to use the algorithm. The main specifications are:
As a lot of time and effort were spent in creating the kfino algorithm, please cite it when using it for data analysis:
https://arxiv.org/abs/2208.00961.
See also citation() for citing R itself.
The kfino logo was created using the hexSticker package:
Walk-over-weighing system:
These binaries (installable software) and packages are in development.
They may not be fully stable and should be used with caution. We make no claims about them.