The hardware and bandwidth for this mirror is donated by METANET, the Webhosting and Full Service-Cloud Provider.
If you wish to report a bug, or if you are interested in having us mirror your free-software or open-source project, please feel free to contact us at mirror[@]metanet.ch.
![]()
The roads package offers iterative least cost path and minimum
spanning tree methods for projecting forest road networks. The methods
connect a set of target points to an existing road network using igraph
https://igraph.org to
identify least cost routes. The cost of constructing a road segment
between adjacent pixels is determined by a user supplied
weightRaster and a weightFunction; options
include the average of adjacent weightRaster values, and a
function of the elevation differences between adjacent cells that
penalizes steep grades. These road network projection methods are
intended for integration into R workflows and modelling frameworks used
for forecasting forest change, and can be applied over multiple
timesteps without rebuilding a graph at each timestep.
You can install the released version of roads from CRAN with:
install.packages("roads")And the development version from GitHub with:
# install.packages("devtools")
devtools::install_github("LandSciTech/roads")To simulate the development of roads three inputs are needed: the
current road network, the locations that should be connected to the road
network (landings), and a weights raster that together with the
weighting function determines the cost to connect two raster cells with
a road. Typically the roads and landings are sf objects or
sp Spatial* objects and the weight is a raster.
library(roads)
library(raster)
# data set installed with roads package
demoScen <- prepExData(demoScen)
scen <- demoScen[[1]]
prRoads <- projectRoads(landings = scen$landings.points,
weightRaster = scen$cost.rast,
roads = scen$road.line,
plotRoads = TRUE) 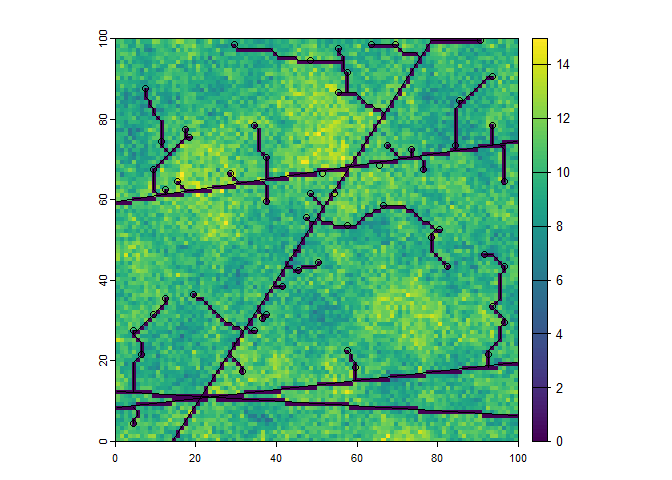
By default projectRoads uses an iterative least cost
paths algorithm (roadMethod = "ilcp") to connect each
landing to the existing road by the lowest cost path, updating the cost
after each landing is connected. A minimum spanning tree method
(roadMethod = "mst") is also available.
For more details see
vignette("roads-vignette", package = "roads")
Copyright (C) 2021 Her Majesty the Queen in Right of Canada, as represented by the Minister of Environment and Climate Change.
And
Copyright 2018 Province of British Columbia
Licensed under the Apache License, Version 2.0 (the “License”); you may not use this file except in compliance with the License. You may obtain a copy of the License at
https://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
These binaries (installable software) and packages are in development.
They may not be fully stable and should be used with caution. We make no claims about them.